| äōØ╔ÖCŲ„╚╦ |
| CHUANGZE ROBOT |
─┐Ū░Ė·█ÖĪ░╩ųč█─XĪ▒ģf═¼Ą─▓┘ū„┴„│╠,ų„ę¬░³└©╩ųč█╬╗ų├ś╦Č©Īó╗∙ė┌łDŽ±ūź╚Ī╬╗ū╦╣└ėŗŠWĮj─Żą═Īóė|ėXĖąų¬┴”Ę┤üš{╣ØĄ╚╝╝ągļy³cĪŻ
1) ╚ń║╬īŹĢrĪó£╩┤_Ė·█Ö─®Č╦ł╠ąąŲ„┼c▒╗▓┘ū„╬’¾wų«ķgĄ─┐šķgŠÓļx║═╬╗ų├ą┼Žó?╩ųč█╬╗ ų├ś╦Č©╩Ū═©▀^Į©┴óÖCŲ„╚╦─®Č╦ł╠ąąŲ„ū°ś╦ŽĄ┼cŽÓÖCū°ś╦ŽĄų«ķg▐DōQĻPŽĄ,īŹ¼FęĢėXę²ī¦ ÖCŲ„╚╦▓┘ū„Ą─£╩┤_ąį║═┐╔┐┐ąįĪŻĖ∙ō■ÖCąĄ▒█┼cŽÓÖCų«ķgĄ─čb┼õĘĮ╩Į,╩ųč█ś╦Č©Ęų×ķEye to-Hand║═Eye-in-HandĪŻįńŲ┌Ą─╩ųč█ś╦Č©╝╝ągų„ę¬ę└┐┐ŠžĻćĻPŽĄ(ą²▐DŠžĻć║═ŲĮęŲŠž Ļć)├Ķ╩÷ÖCŲ„╚╦║═ŽÓÖCų«ķgĄ─┐šķgĻPŽĄĪŻļSų°ėŗ╦ŃÖCęĢėX║═ā×╗»╦ŃĘ©Ą─░lš╣,╗∙ė┌łDŽ± ╠Ä└Ē║═öĄīWā×╗»Ą─╩ųč█ś╦Č©ĘĮĘ©ųØu│╔×ķų„┴„,└¹ė├ś╦Č©░Õ╗“╠žš„³c▀MąąŽÓÖCś╦Č©,į┘ ĮY║ŽÖCŲ„╚╦─®Č╦ł╠ąąŲ„Ą─╬╗ų├öĄō■▀Mąąś╦Č©ėŗ╦Ń,ęįīŹ¼F£╩┤_Ą─╩ųč█ś╦Č©ĪŻ
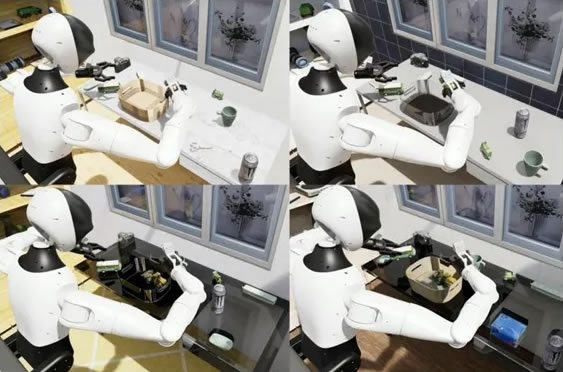
Eye-in-Hand;ŽÓÖC╣╠Č©į┌─®Č╦ł╠ąąŲ„,ŽÓÖC╦∙öz╚Īł÷Š░öĄō■ļSų°ÖCąĄ▒█ęŲäėČ°░l ╔·ūā╗»,▀m║Žī”─®Č╦▓┘ū„ī”Ž¾(▒╚╚ń┴Ń╝■)▀MąąGŠ½Č╚Šų▓┐ė^▓ņ,ę▓┐╔ęįņ`╗Ņš{š¹ ęĢĮŪ,ė├ė┌Š½├▄čb┼õĄ╚æ¬ė├ĪŻ
Eye-to-Hand:ŽÓÖC╣╠Č©░▓čbį┌╚╦ą╬ÖCŲ„╚╦─│éĆ╬╗ų├(▒╚╚ńŅ^▓┐),d┴óė┌ÖCąĄ▒█ ▀\äėĪŻŽÓÖCęĢĮŪĖ▓╔wš¹éĆ╣żū„┐šķg,┐╔īŹ¼F╚½Šųė^£y,▀m║Ž▒O┐žÖCŲ„╚╦š¹¾w▀\äė▄ē █E╗“┤¾ĘČć·ł÷Š░,ś╦Č©ĮY╣¹¤oąĶŅlĘ▒Ė³ą┬ĪŻ
2) ╚ń║╬š²┤_▀xō±Ė·Į╗╗ź╬’¾wĄ─▓┘ū„╬╗ū╦?ÖCŲ„╚╦ūź╚ĪÖz£y╝╝ąg╩ŪÖCŲ„╚╦ŅIė“ųąĄ─ųžę¬ 蹊┐ĘĮŽ“ų«ę╗,╔µ╝░ĄĮÖCŲ„╚╦į┌īŹļH▓┘ū„ųą½@╚ĪZā×ūź╚Īū╦æB║═╬╗ų├Ą──▄┴”,Å─Č°īŹ¼F ėąą¦ĪóĘĆČ©Ą─ūź╚Īäėū„ĪŻūź╚ĪÖz£y╝╝ągĄ─░lš╣┐╔ęįĘų×ķé„ĮyĄ─ĮŌ╬÷ĘĮĘ©║═╗∙ė┌╔ŅČ╚īW┴Ģ Ą─ĘĮĘ©ĪŻé„ĮyĄ─ĮŌ╬÷Ę©╩Ū╗∙ė┌ÖCąĄ╩ųū”║═─┐ś╦╬’¾wĄ─▀\äėīW║═äė┴”īWĻPŽĄ▀MąąĮ©─Ż,ėŗ ╦ŃZā×ūź╚Ī╬╗ū╦,▀m║ŽĘŪ│Ż£╩┤_ł÷Š░┐žųŲąĶŪ¾,▒╚╚ń╣żśIÖCŲ„╚╦ī”╬’¾wūź╚Ī║═ęŲäė,Ą½ ╩▄Ž▐ė┌ŁhŠ│Å═ļsąį║═Ę║╗»─▄┴”▓╗ūŃĪŻé„ĮyĘĮĘ©═∙═∙ąĶę¬Å═ļsĄ──Żą═║═ģóöĄš{š¹,¤oĘ©īŹ ¼Fī”Ė„ĘNł÷Š░║═╬’¾wĄ─ųŪ─▄▀mæ¬ĪŻ
ļSų°╚╦╣żųŪ─▄║═ÖCŲ„īW┴Ģ╝╝ągĄ─▓╗öÓ░lš╣,╔ŅČ╚īW┴Ģūź╚Ī▓▀┬į│ų└mī¦╚ļĪŻ╗∙ė┌╔ŅČ╚īW┴Ģ Ą─ūź╚Ī╝╝ąg═©▀^╔ŅČ╚╔±ĮøŠWĮjī”┤¾┴┐łDŽ±öĄō■▀Mąąė¢ŠÜ,Å─Č°īW┴Ģūź╚ĪĄ─š²┤_╬╗ų├║═ū╦ æB,Š▀ėąĖ³║├Ą─Ę║╗»─▄┴”║═▀mæ¬ąįĪŻ╗∙ė┌╔ŅČ╚īW┴ĢĄ─ūź╚Ī╝╝ąg┐╔ęįĘų×ķ╗∙ė┌ūź╚Ī║“▀x┐“ ║═╗∙ė┌¶ö░¶ąį║»öĄā╔ŅÉĪŻ
╗∙ė┌ūź╚Ī║“▀x┐“Ą─ĘĮĘ©ų„ę¬▓╔ė├╗¼┤░Ą─ĘĮĘ©ŅAŽ╚į┌▌ö╚ļłDŽ±╔Ž╔·│╔╚¶Ė╔éĆĖą┼d╚żĄ─ģ^ ė“,═©▀^ŠĒĘe╔±ĮøŠWĮjĄ╚─Żą═╠ß╚ĪłDŽ±╠žš„,ŅA£yūź╚Ī╬╗ų├║═ū╦æBĪŻįōĘĮĘ©Öz£yŠ½Č╚▌^ GĄ½ę“Ģ■«a╔·┤¾┴┐Ą─║“▀x┐“Č°╩╣Ą├Öz£y╦ŃĘ©║─Ģr▌^ķLĪŻ─┐Ū░¼F┤µę╗ą®ÖCŲ„╚╦ūź╚ĪĄ─╚╬äš ╗∙£╩öĄō■╝»┐╔ęįė├ė┌ūź╚Ī╬╗ų├║═ū╦æBŅA£yė¢ŠÜā×╗»ĪŻ▒╚╚ń┐Ą─╬Ā¢┤¾īWäōĮ©Ą─Cornel GraspöĄō■╝»,╝┤╩╣ė├KinectV1ŽÓÖCį┌šµīŹł÷Š░ųą▓╔╝»,╔µ╝░240ĘN╔·╗Ņųą│ŻęŖ╬’¾w Ą─885ÅłRGB-DłDŽ±║═ŽÓæ¬Ą─╚²ŠSįŲ³cĪŻöĄō■╠žš„║Ł╔w┴╦ČÓśėĄ─ī”Ž¾ą╬ĀŅ║═┤¾ąĪ╝░Ħ ėąą²▐DĮŪČ╚Ą─ūź╚Īś╦ūó┐“ĪŻ
╗∙ė┌¶ö░¶ąį║»öĄĄ─ĘĮĘ©ų„ę¬═©▀^īW┴Ģūź╚Ī┘|┴┐║»öĄ,įu╣└ūź╚Ī┘|┴┐,▀MČ°┤_Č©Zā×ūź╚Ī ╬╗ų├║═ū╦æBĪŻįōĘĮĘ©īŹ¼FČ╦ĄĮČ╦ė¢ŠÜ┼cŅA£y,╦ŃĘ©▀\ąą╦┘Č╚▌^┐ņĪŻĄõą═Ąž,ųŪį¬ÖCŲ„╚╦ ░l▓╝ķ_į┤Ę┬šµöĄō■╝»AgiBotDigitalWoHdDataset,║Ł╔w╬Õ┤¾ŅÉł÷Š░Īó180+ŲĘŅÉŠ▀¾w╬’ ŲĘĄ╚ĪŻŲĮ┼_╗∙ė┌NVDlA1saac-SimĘ┬šµŲĮ║Žķ_░l(Sim2Real),┐╔ęį╠ß╣®GČ╚▒ŲšµĄ─ęĢ ėXõų╚Š║═£╩┤_Ą─╬’└Ē─ŻöMĪŻĘ┬šµ▀^│╠ųą,Š▀╔ĒųŪ─▄öĄō■╔·│╔ę²Ūµ┐╔ęį▀MąąžSĖ╗Ą─ŁhŠ│╣Ō ššĪó╬’¾w▓─┘|Īó╬’└Ēī┘ąįĄ╚ļSÖCūā╗»,═¼Ģrų¦│ųČÓĘN▓┘ū„▄ē█Eį÷ÅŖĘĮ╩Į,ęį╔·│╔ČÓśėąį ║═¶ö░¶ąįĄ─īŻ╝ę▄ē█EöĄō■,į÷ÅŖ─Żą═Ę║╗»─▄┴”ĪŻ─┐Ū░AgiBotDigitalWord┐╔Į©┴óž×┤® īŻ╝ę▄ē█E╔·│╔Īó─Żą═ė¢ŠÜĪó╗∙£╩£yįćĪó▓┐╩“×ūCĄ─═Ļš¹įu╣└┴„│╠,ų¦│ųī”ÖCŲ„╚╦Ą─Č╦ĄĮ Č╦─Żą═▀MąąČÓ├µ£yįćĪŻ
 |
| ÖCŲ„╚╦Ąū▒P Disinfection Robot Ž¹ČŠÖCŲ„╚╦ ųvĮŌÖCŲ„╚╦ ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ╔╠ė├ÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ųŪ─▄Ę■äšÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ š╣ÅdÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ║╦╦ß▓╔śėÖCŲ„╚╦ ųŪ─▄┼õ╦═ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ |


